
TL:DR
AVESA is an autonomous vehicle safety solution concept I designed for my “Future of Mobility” special topics class, taught by Mitchell Joachim.
The idea struck me in the wake of the first fatal autonomous vehicle accident as one of Uber’s autonomous testing vehicles crashed into a cyclist at night.
As someone equally invested in car safety (see Safe Choix) and autonomous vehicles (I did my advanced essay writing final paper on them), this accident propelled me to not just closely examine what happened, but more importantly think about what can be done to prevent this from ever happening again.
some context
Vision vs. reality
Both Uber and Waymo view autonomous vehicle as enablers for people that bring convenience and affordability to personal transport, which is indeed true once full autonomous driving arrives. What they fail to publicly acknowledge in the meanwhile is the complexity of autonomous driving technology and how far we still are from it working smoothly in the real world.
Many people view self-driving cars being tested on road today as self-sufficient, when in reality, many require continuous network connection and the help of high-definition 3D maps that require constant update.
What this reality creates is that there are many ways, and in many scenarios that autonomous driving technology can go wrong. In Uber’s accident, the car is even equipped is LiDAR, a very expensive system that shoots out continuous laser to detect surroundings which isn’t subject to the challenges of low visibility at night like many camera-based vision systems. However, the tragedy still happened. What this tells us is that:
Autonomous vehicles have limitations. Oftentimes intervention is needed to prevent fatal accidents.
Evident from Baidu’s self-driving project log, out of 122 of total autonomous miles, 9 engagements were required due to either delay or discrepancy in perception. Autonomous vehicles can make errors, but they don’t have to be fatal if we challenge ourselves with the question:
Why can’t we aim for a future with no pedestrian fatality?
And this, is exactly what AVESA is about, to prevent what Michael Ramsey, a self-driving car expert with Gartner, characterized as "a complete failure of the system to recognize an obviously seen person who is visible for quite some distance in the frame” such as this Uber accident (source).
What is it
AVESA stands for Autonomous Vehicle External Situational Awareness. It is an integrated safety redundancy solution that detects non-vehicle road users from existing wireless standards so autonomous vehicles can act accordingly under their presence, preventing fatal vehicle-to-non-vehicle accidents.
In the context of the Uber’s accident, if the car were to equipped with AVESA, the system would work independently from the sensors and processing system onboard and slow down the vehicle as its detects Elaine Herzberg, the cyclist, from the WiFi signal her personal devices might be emitting, and stop the vehicle if close-range bluetooth signal is detected.










How does it work
A beamformer is a spatial filter that operates on the output of an array of sensors in order to enhance the amplitude of a coherent wavefront relative to background noise and directional interference. The response of a given element is plotted on a polar graph, where the angle is the offset from the MRA, and the radius is the magnitude response (dB) in that direction. Element responses (determined by the 3dB down point) are very wide -- in this example the width is about 90 degrees.
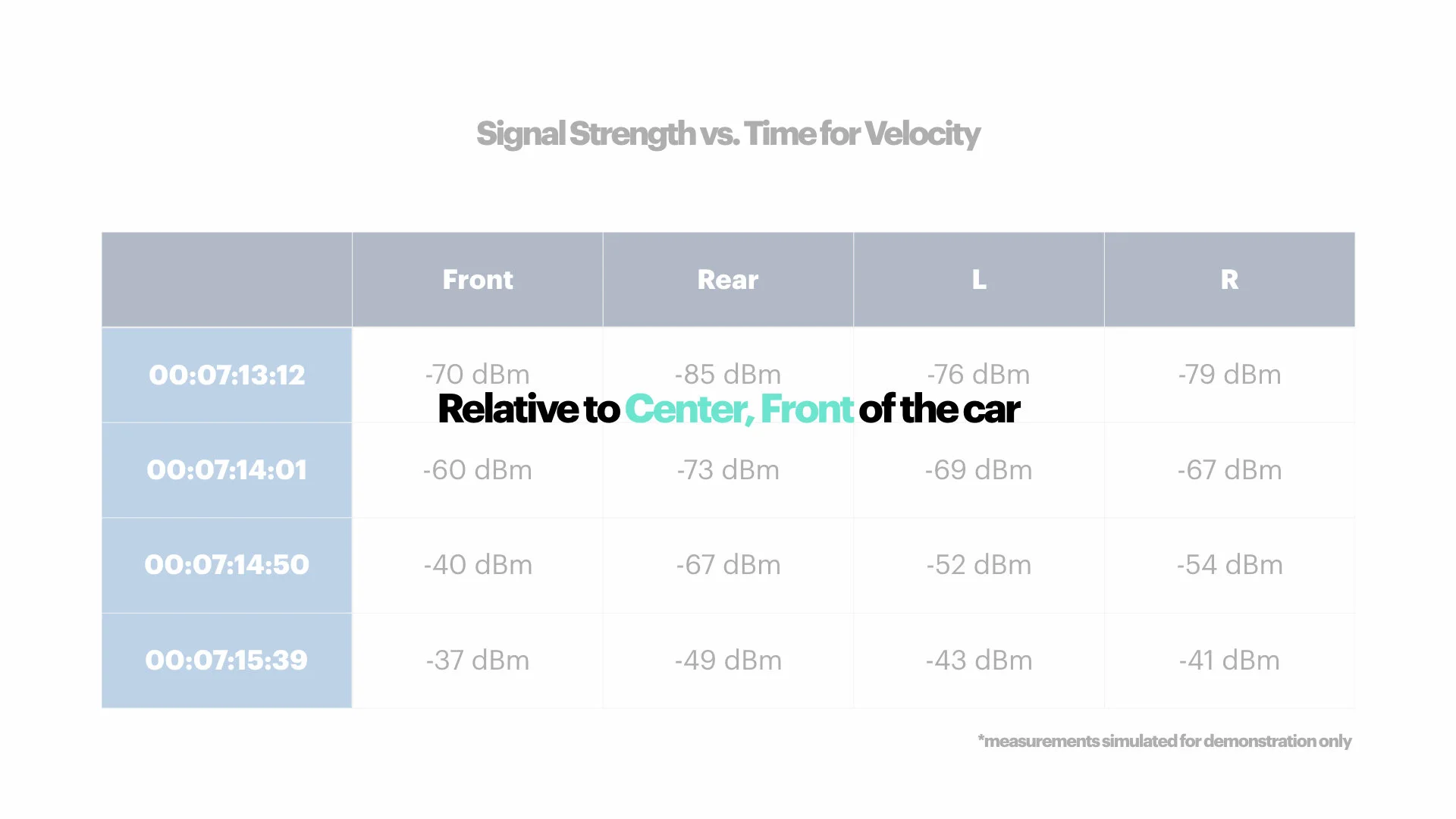
The goal of beamforming is to sum multiple elements to achieve a narrower response in a desired direction (the MRA). That way when we hear a sound in a given beam, we know which direction it came from. Using beamforming for direction-of-arrival estimation, we can determine which direction are the signals detected from personal devices of other road users, and let autonomous driving systems act accordingly.











System logic
AVESA’s fail-safe system aims to bring trust back to autonomous vehicle. It serves as a watchdog outside of the main processing system that shines when all else fail to work, ensuring pedestrian safety in adverse and extreme situations.







